近日,太阳成集团tyc234cc天然橡胶智能化生产团队在自走式割胶机器人方面取得研究进展,在国际期刊《Engineering Applications of Artificial Intelligence》(IF8.3)上发表最新学术论文(如图1所示),题目为“A dual-algorithm fusion positioning method based on global navigation satellite system signal quality assessment mode”。
在智能机器人与无人系统快速发展的背景下,高精度定位是实现自主导航的关键基础。然而,在城市峡谷、密集林区等复杂环境中,GNSS信号易受到遮挡、多路径效应等影响,导致定位精度显著下降,甚至完全失效。针对这一问题,研究团队提出了一种自适应多传感器融合定位框架,实现复杂环境下稳定可靠的连续定位。
图1文章首页
文章提出了一种基于多传感器融合的割胶机器人自主定位系统(如图2所示),核心创新点主要体现在以下方面:
1. 设计了一种具有高度鲁棒性的GNSS自适应模型,该模型具备多维信号质量感知和智能决策能力。该模型能够动态评估并优化复杂环境下GNSS数据的使用,从而显著提升定位系统的鲁棒性和可靠性。
2. 在GNSS信号优良环境中,通过扩展卡尔曼滤波器将GNSS与惯性导航系统相结合,从而实现高精度全球定位。随后利用激光雷达高程数据校正Z轴漂移,从而在整体精度、短期连续性和垂直稳定性之间取得平衡。这种方法显著提高了系统的鲁棒性和可靠性。
3. 在GNSS信号受限的环境中,通过因子图融合技术将GNSS-IMU紧密耦合并与激光雷达测距因子相结合,利用点云数据(PCD)地图匹配进行全局校正,从而实现高精度、鲁棒的定位。
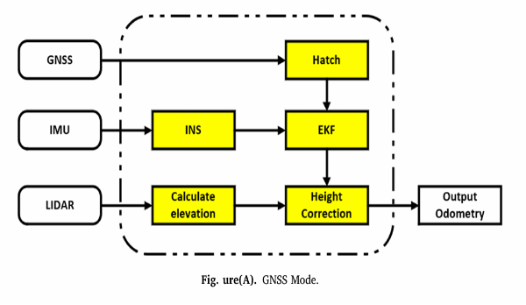
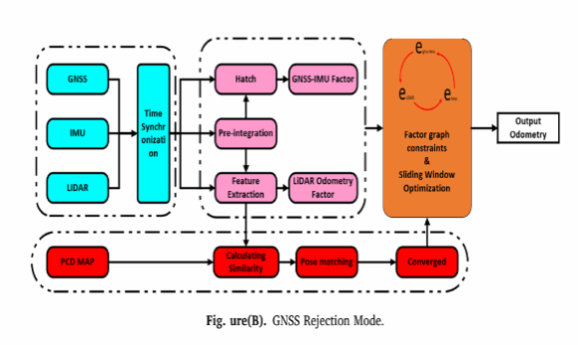
图2定位系统结构
如图3和图4所示,在KITTI 等全球公开数据集上,该方法在误差分布与轨迹一致性方面均优于现有主流方法,整体性能提升超过30%。
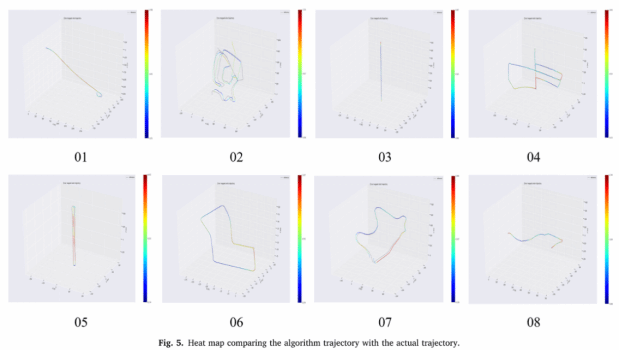
图3位姿对比热力图
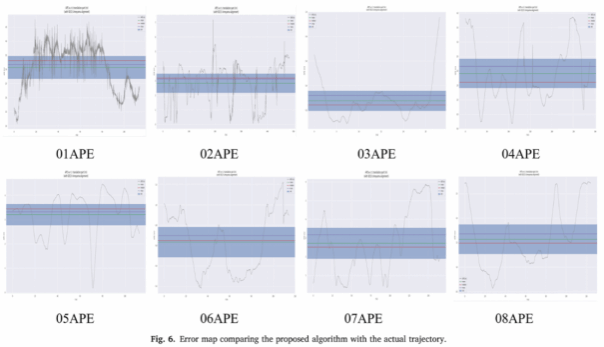
图4 位姿对比误差图
为验证算法在真实环境中的适用性,团队在海南省儋州市橡胶林开展了实地实验(图5)。结果显示,在树木遮挡严重、GNSS信号不稳定的条件下,该方法仍能保持高精度定位,展现出良好的工程应用潜力。
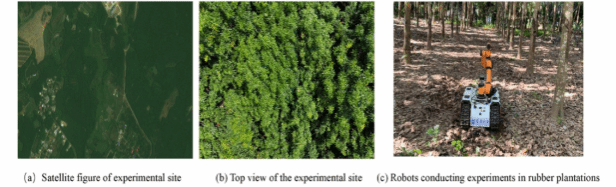
图5 胶林实验场景
该研究成果为复杂环境下的高精度定位提供了新的技术路径,可广泛应用于农业机器人、无人驾驶、智能巡检等领域,对推动智能装备在实际场景中的落地应用具有重要意义。展示了太阳成集团tyc234cc天然橡胶智能化生产团队在自走式割胶机器人技术方面的最新进展。
此次研究得到了国家天然橡胶现代产业技术体系项目、海南省重点研发项目、海南省科技人才创新项目和云南省科技厅科技计划项目的资助。
本研究由太阳成集团tyc234cc作为唯一单位发表,张喜瑞教授为论文第一作者,谷润泽(硕士)为论文第二作者,刘俊孝副教授为论文通讯作者。
文章链接:
https://doi.org/10.1016/j.engappai.2026.114433
一审:颜子钦
二审:汝绍锋
三审:张喜瑞

 太阳成集团tyc234cc公众号
太阳成集团tyc234cc公众号 致远班
致远班